機器人的機械結構介紹(PPT 76頁)
機器人的機械結構介紹(PPT 76頁)內容簡介
第二章機器人的機械結構
2.1機器人的組成和分類
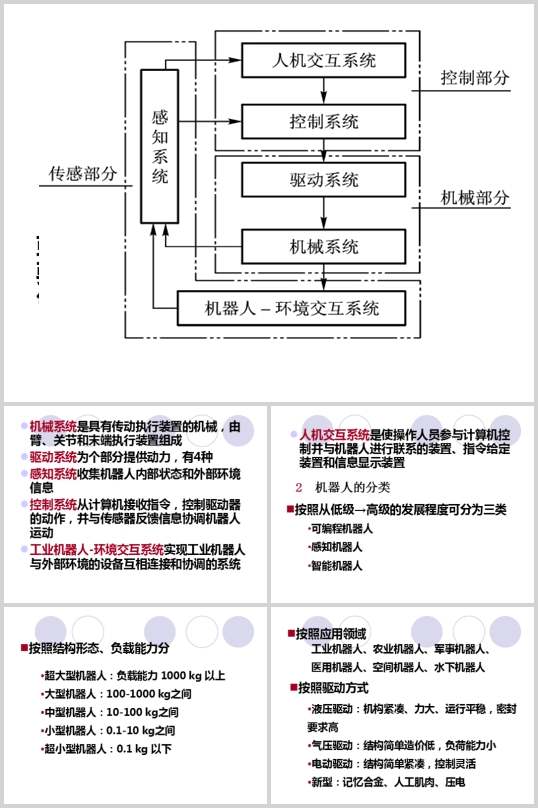
機械係統是具有傳動執行裝置的機械,
由臂、關節和末端執行裝置組成
驅動係統為個部分提供動力,有4種
感知係統收集機器人內部狀態和外部環境信息
控製係統從計算機接收指令,控製驅動器的動作,
並與傳感器反饋信息協調機器人運動
工業機器人-環境交互係統實現工業機器人與
外部環境的設備互相連接和協調的係統
2機器人的分類
人機交互係統是使操作人員參與計算機控製並與機器
人進行聯係的裝置、指令給定裝置和信息顯示裝置
3機器人機構運動簡圖
定義:用機構與運動圖形符號表示機器人機械臂、
手腕和手指等運動機能的圖形。
目的:分析和記錄機器人各種運動及運動組合
(1)常見圖形符號
(2)5種典型機器人的機構簡圖
..............................
2.1機器人的組成和分類
機械係統是具有傳動執行裝置的機械,
由臂、關節和末端執行裝置組成
驅動係統為個部分提供動力,有4種
感知係統收集機器人內部狀態和外部環境信息
控製係統從計算機接收指令,控製驅動器的動作,
並與傳感器反饋信息協調機器人運動
工業機器人-環境交互係統實現工業機器人與
外部環境的設備互相連接和協調的係統
2機器人的分類
人機交互係統是使操作人員參與計算機控製並與機器
人進行聯係的裝置、指令給定裝置和信息顯示裝置
3機器人機構運動簡圖
定義:用機構與運動圖形符號表示機器人機械臂、
手腕和手指等運動機能的圖形。
目的:分析和記錄機器人各種運動及運動組合
(1)常見圖形符號
(2)5種典型機器人的機構簡圖
..............................

下一篇:尚無數據